
















智能网联学科领域
OS-mars 通过“从Autoware 基础- 行业应用算法深入,满足智能网联“实践操作与原理理解”,支持针对汽车自主导航的精度优化与算法开发
 NV-magic
行业应用导航
NV-magic
行业应用导航
 OS-nano
具身智能导航
OS-nano
具身智能导航
 OS-mate
ROS/ROS2导航
OS-mate
ROS/ROS2导航
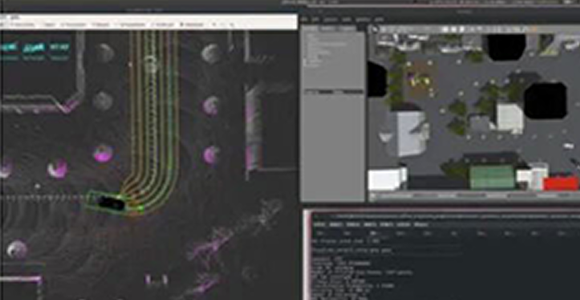
 OS-mars
autoware导航
OS-mars
autoware导航
 OS-saturn
Apollo导航
OS-saturn
Apollo导航
 GitHub
GitHub






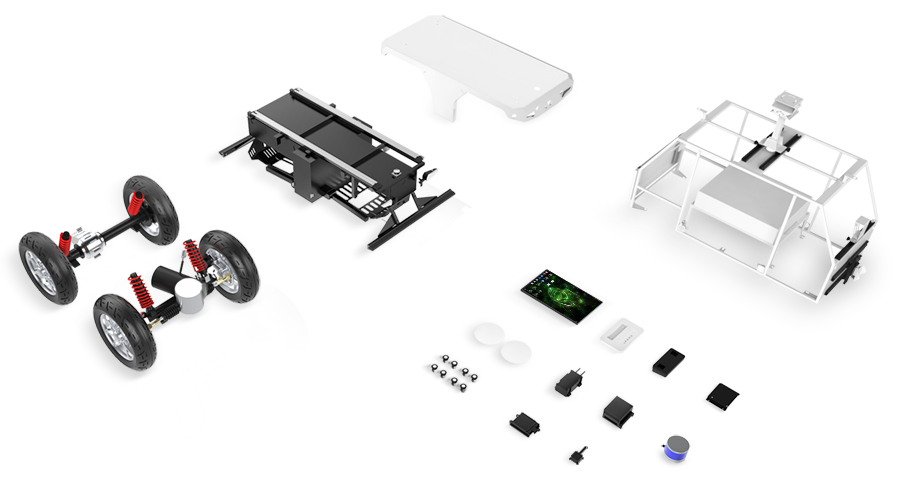
Autoware导航作为全栈自主移动中间件,通过提供 “感知 - 定位 - 规划 - 控制” 标准化技术框架,与FR系列、MK系列多款高性能机器人底盘通过一站式整合安装配置,覆盖所有需要 “自主移动 + 环境交互” 的技术领域 ——为学术教育与自动驾驶企业、科研开发构建自动驾驶体系提供 “ 躯体与大脑 “。
多源传感信息与多种算法模型融合,支持复杂多样环境下的导航开发应用,为自动驾驶、机器人和增强导航应用提供了坚实的技术基础。

从硬件底层到算法上层、从结构硬件到系统集成、从安装操作到创新研究全流程构建激发创新和解决复杂问题的实践与科研框架。
通过Autoware导航科研教育平台,基于“感知 - 定位 - 规划 - 控制”全面技术架构从实践到理论,从理论到科研"的开发体系,为智能网联与更多技术领域技术创新奠定坚实基础

OS-mars 通过“从Autoware 基础- 行业应用算法深入,满足智能网联“实践操作与原理理解”,支持针对汽车自主导航的精度优化与算法开发

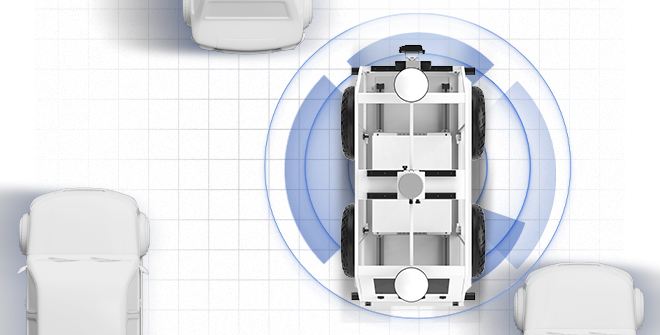
OS-mars 通过“开源自主导航”将传统自动化技术升级为“无人化自主移动 + 作业协同”智能自动化技术,成为机械自动化与计算机信息专业的关键支撑平台

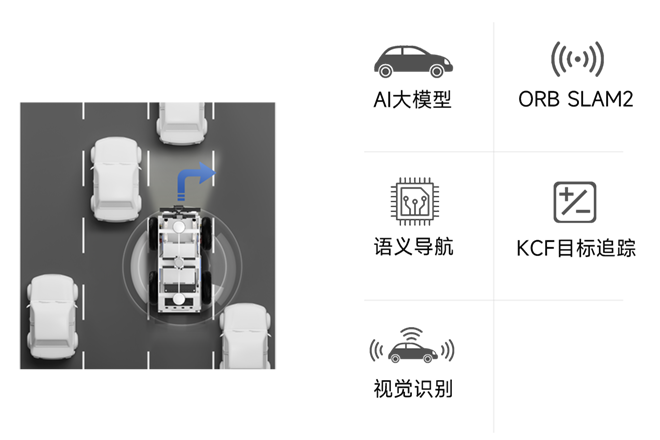
OS - mars 通过“底层开源通用 AI 技术”,目标检测与识别、实例分割、图像增强与去噪内容,支持“围绕人工智能” 学科形成了专属 AI 开发能力

OS-mars 通过 “RTK 融合” 核心技术,推动智慧农业、农业工程多专业,为农业设备智能化研发提供全流程技术支撑,成为专业与产业落地的关键衔接工具

定位算法开发

点云算法开发

点云聚类分割开发

仿真部署开发

规控算法开发

速度规划开发
建图作业开发

导航作业开发

开发

实训

教学

科研
支持搭载各种模块化应用,与您共同拓展行业无限未来

