
















人工智能学科领域
OS-nano 通过“降低多模态 AI 大模型的部署门槛、提升端侧训练效率”,提供从模型落地到应用验证的完整支撑
 NV-magic
行业应用导航
NV-magic
行业应用导航
 OS-nano
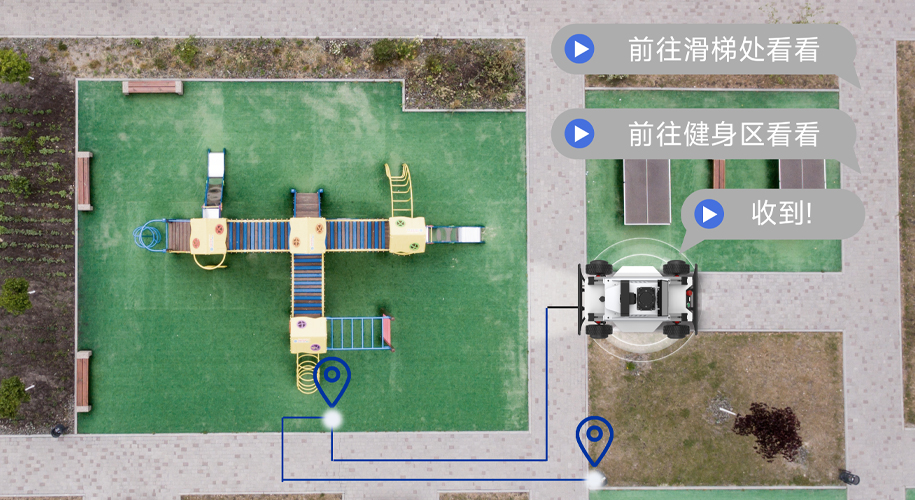
具身智能导航
OS-nano
具身智能导航
 OS-mate
ROS/ROS2导航
OS-mate
ROS/ROS2导航
 OS-mars
autoware导航
OS-mars
autoware导航
 OS-saturn
Apollo导航
OS-saturn
Apollo导航
 GitHub
GitHub








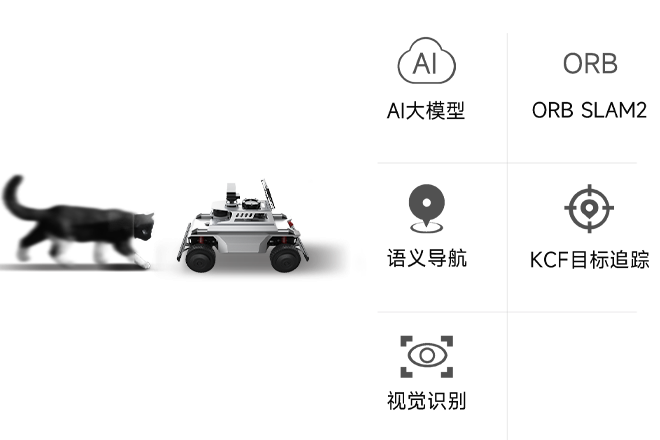
OS-nano 是一款集成多模态 AI 能力的智能机器人导航产品模块,通过高性能 GPU 支撑多模态大模型运行,融合视觉、语音等感知方式实现环境理解,结合视觉 SLAM 与自动驾驶架构完成不同类型具身机器人路径规划和任务执行。
提供语义交互、物品识别等高阶 AI 功能,配套 ROS 系统与算法实训内容,支持快速了解具身智能自主导航算法,既满足基础学习实践需求,也为高阶人工智能科研创新提供从硬件到软件的全栈支撑,实现从环境感知、决策规划到任务执行的一体化开发实践 。
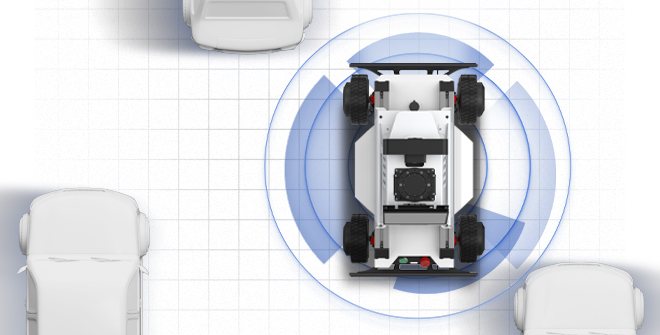
多源传感信息与多种算法模型融合,支持复杂多样环境下的导航开发应用,为自动驾驶、机器人和增强导航应用提供了坚实的技术基础。
从硬件底层到算法上层、从结构硬件到系统集成、从安装操作到创新研究全流程构建激发创新和解决复杂问题的实践与科研框架。
以 “模块化硬件支撑 + 多模态 AI 大模型部署 + ROS 生态集成” 为核心,OS-nano 融合人工智能、具身智能、移动机器人、智能网联汽车四大领域技术。打造“AI 算法 - 具身交互 - 自主导航 - 车路协同 ” 跨领域一体化技术开发平台。

OS-nano 通过“降低多模态 AI 大模型的部署门槛、提升端侧训练效率”,提供从模型落地到应用验证的完整支撑

OS-nano 通过 “硬件实体 + 多模态感知 + 实时行动控制”,成为智能体物理实体与环境交互产生智能开发的关键支撑

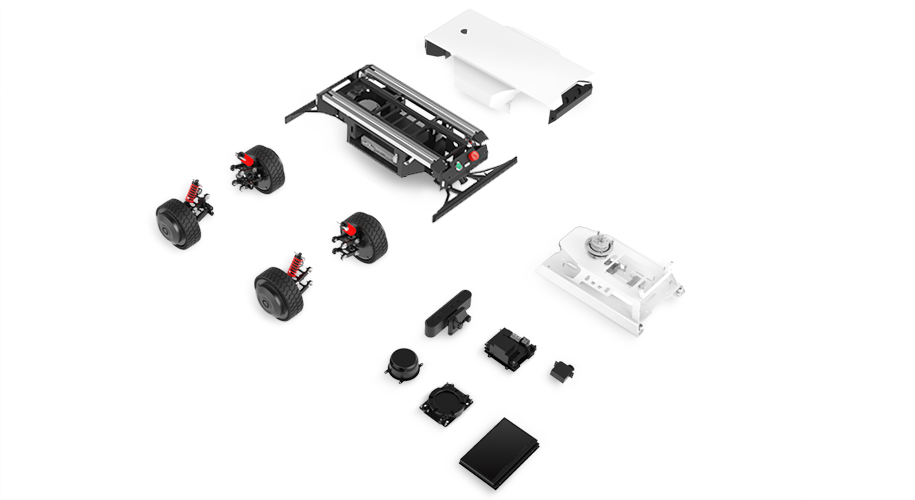
OS-nano 通过 “导航模块与模块化底盘”搭建,为自主导航、场景适配、功能扩展提供从基础学习到深度创新的全周期支撑

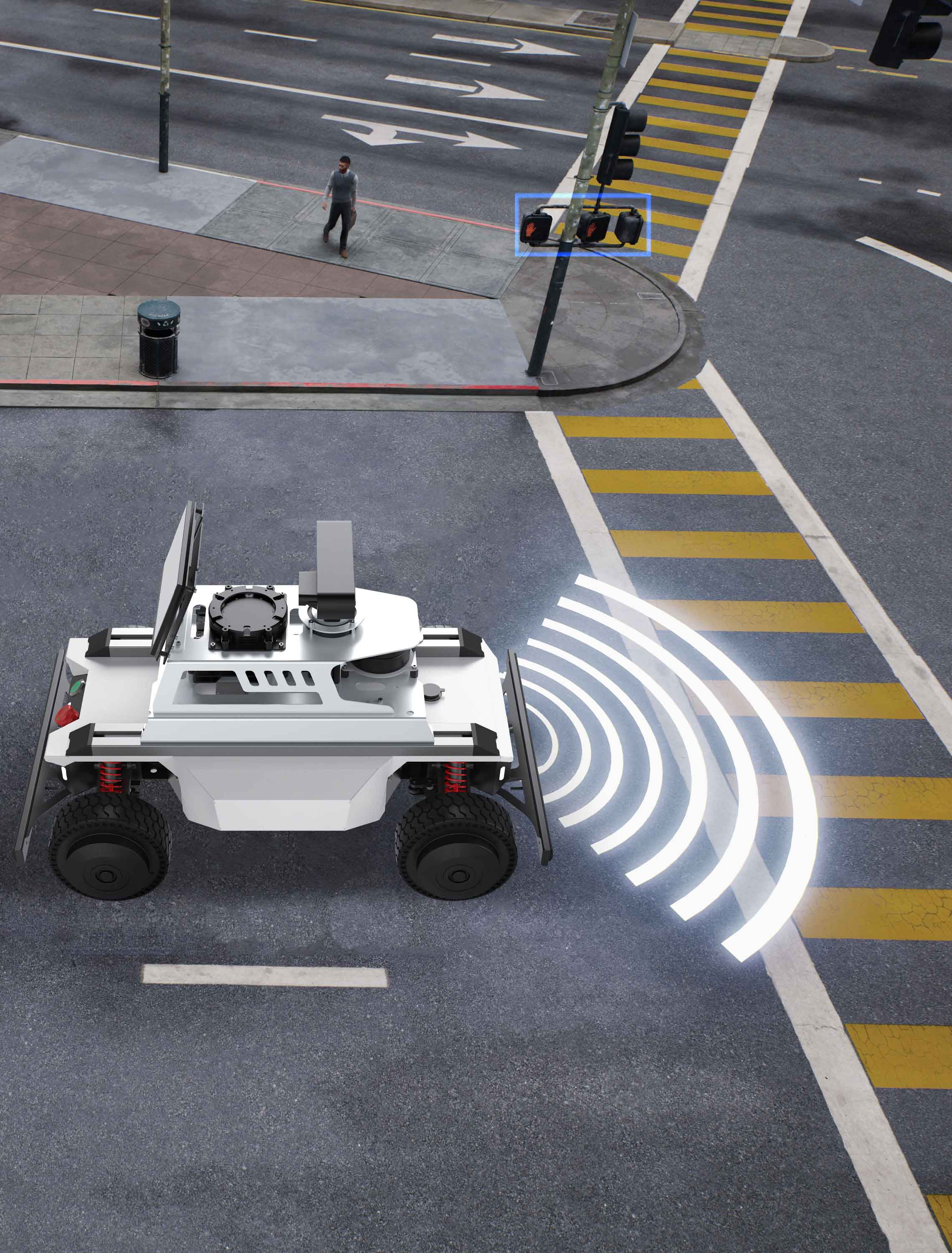
OS-nano通过“实现视觉自动驾驶功能落地”, 为推动“车 - 环境交互能力”实现 ,提供端-端技术开发全方案支撑

语音控制

车道线识别

集群控制
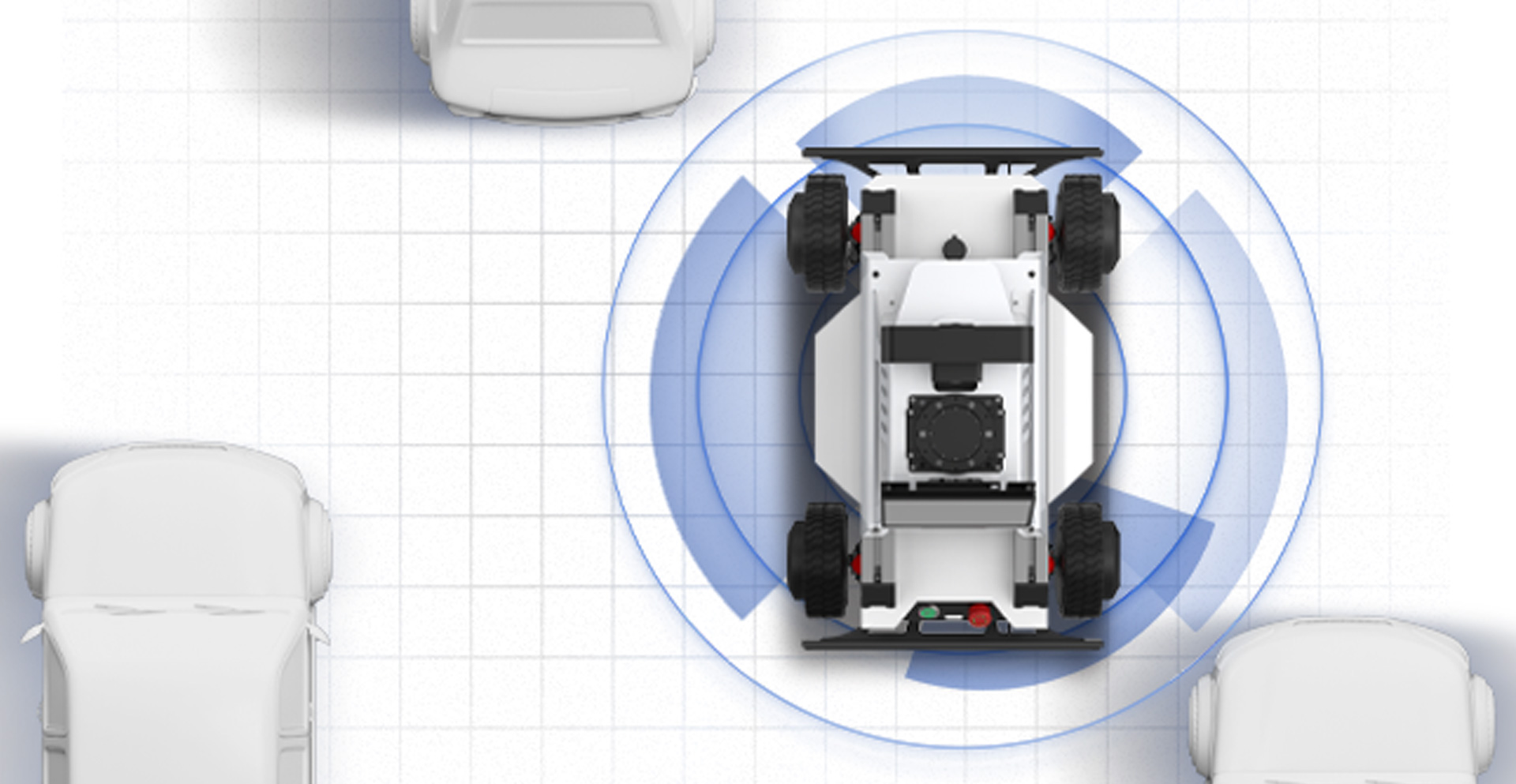
视觉导航
5.jpg
1.jpg

2.jpg
4.jpg

开发

实训

教学

科研
支持搭载各种模块化应用,与您共同拓展行业无限未来





