





Mechanical Design, Fabrication & Automation
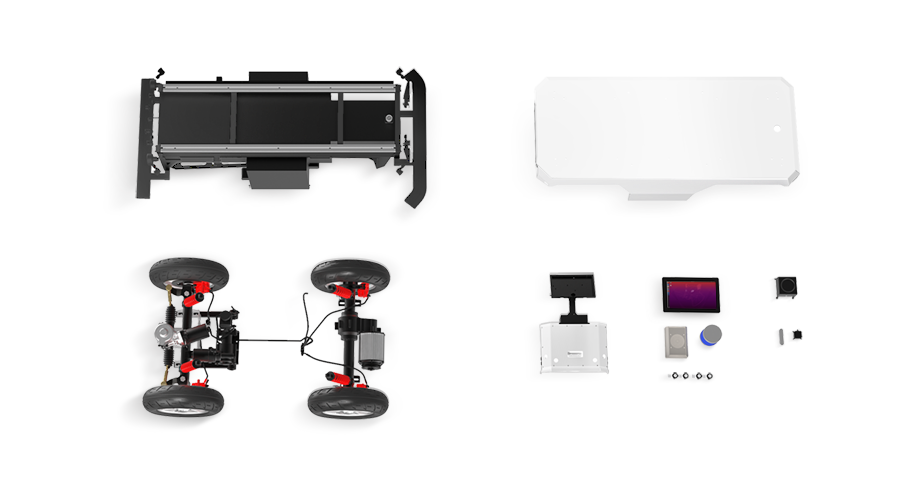
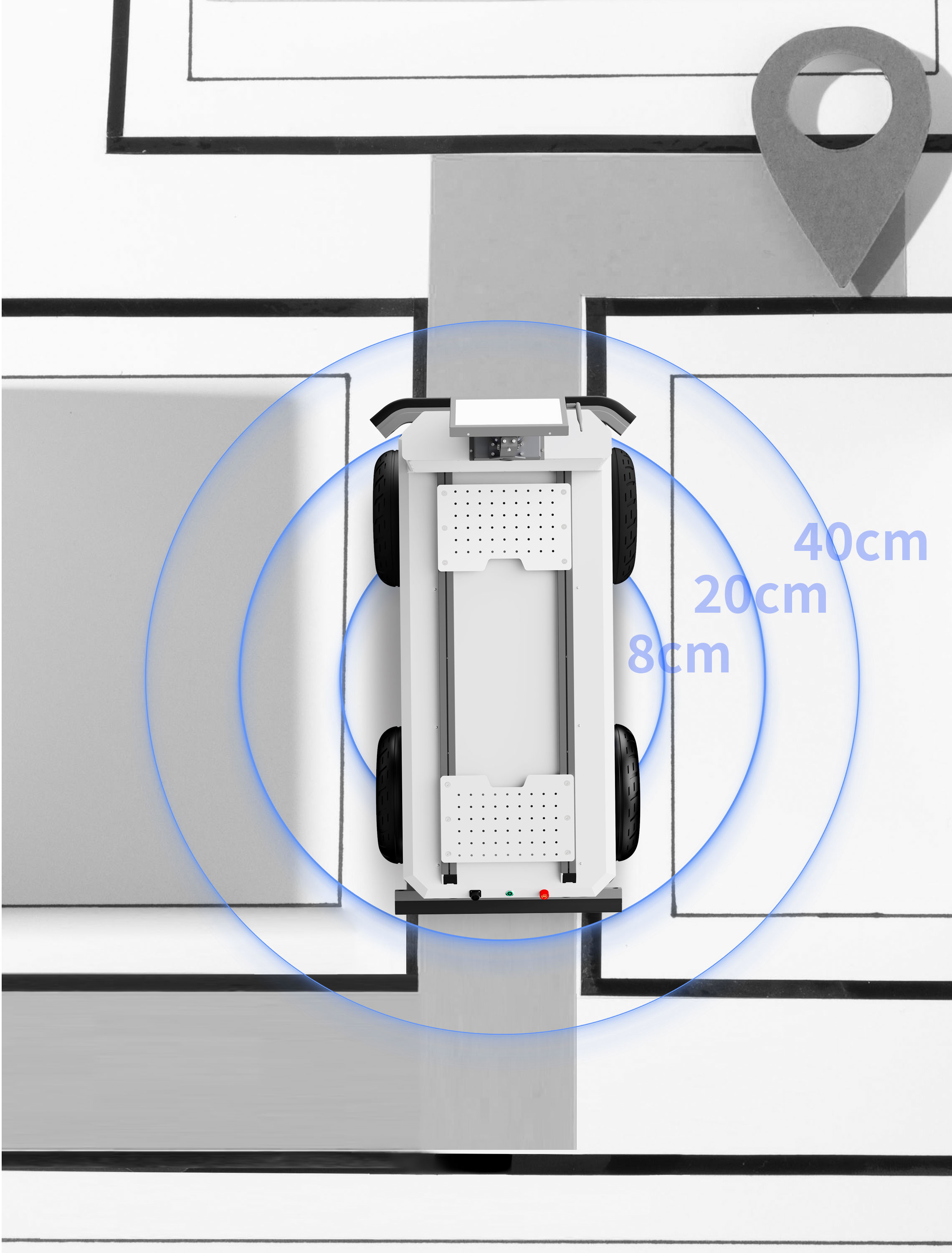
Through the construction, debugging and optimization of "chassis and sensors (LiDAR, cameras, etc.)", we provide comprehensive support from hardware design to system integration.
 FR-mini
200KG
FR-mini
200KG
 MK-mini
50KG
MK-mini
50KG
 MK-mid
80KG
MK-mid
80KG
 FR-mid
100KG
FR-mid
100KG
 FR-max
300KG
FR-max
300KG
 FR-mega
600KG
FR-mega
600KG
 TK-mid
80KG
TK-mid
80KG
 DT-mini
10KG
DT-mini
10KG
 DT-mid
10KG
DT-mid
10KG
 FB-FW-IIC
150KG
FB-FW-IIC
150KG
 FW-venus
200KG
FW-venus
200KG
 NV-magic
Industry Application Navigation
NV-magic
Industry Application Navigation
 OS-nano
Embodied Intelligent Navigation
OS-nano
Embodied Intelligent Navigation
 OS-mate
ROS1/ROS2 Navigation
OS-mate
ROS1/ROS2 Navigation
 OS-mars
Autoware Navigation
OS-mars
Autoware Navigation
 OS-saturn
Apollo Navigation
OS-saturn
Apollo Navigation
 GitHub
GitHub






Integrated with open-source ROS, this learning kit supports autonomous navigation perception, decision-making, control and communication tasks for different types of mobile robots.
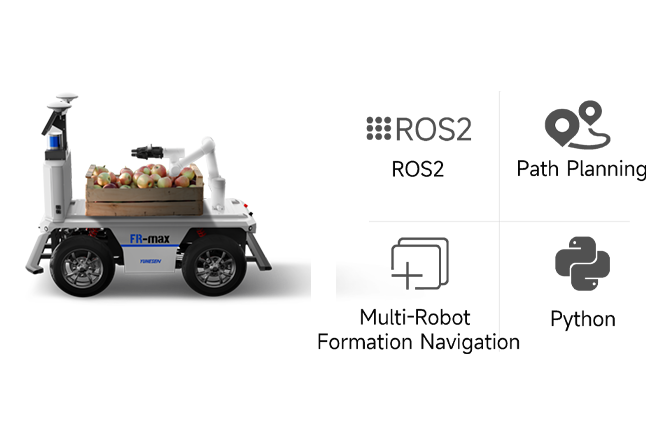
Fusion of multi-source sensing data and diverse algorithms supports navigation development and application in complex environments, laying a solid technical foundation for autonomous driving, robotics and enhanced navigation applications.

From underlying hardware to upper-layer algorithms, hardware structures to system integration, and installation operations to innovative research. Build a full-process practical research framework to drive innovation and solve complex problems.
Based on modular hardware+ROS 1/2 dual-system+ecosystem tools. 4 core (mechanical design, ROS, localization, control) into all-in-one mobile robot development platform with integration, node architecture, localization-mapping fusion and path planning

Through the construction, debugging and optimization of "chassis and sensors (LiDAR, cameras, etc.)", we provide comprehensive support from hardware design to system integration.

Through the learning of "nodes, communication mechanisms, and modular libraries", we provide key support from basics to in-depth innovation for localization and mapping, as well as path planning development.

Through the full-stack architecture of "perception, localization, planning, and control", we build a rapid development platform for multi-sensor fusion, high-precision map adaptation, and complex path decision-making.

From ROS Basics to Advanced ROS2 Industrial Application Algorithms: Meet Research & Application Needs for Practical Operation, Principle Understanding, Precision Optimization & Algorithm Development.

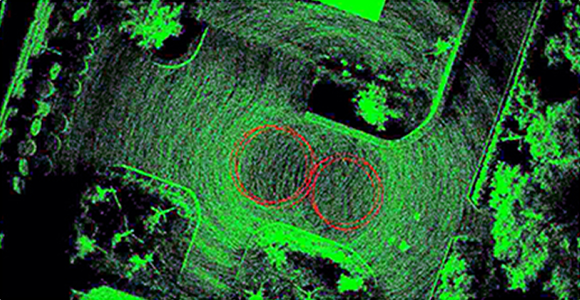
Localization Alg
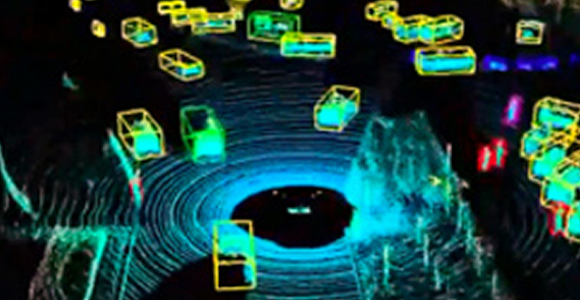
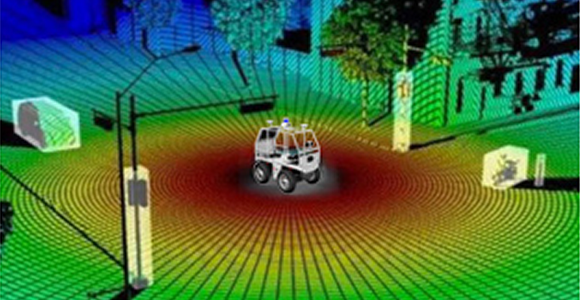
3D LiDAR Fusion
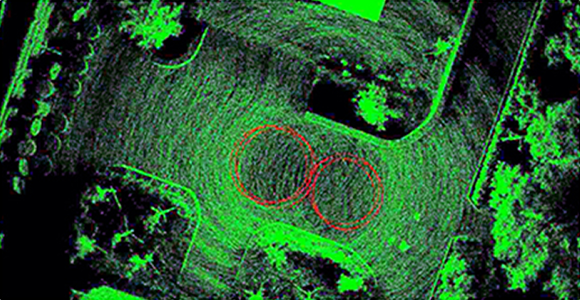
Auto Mapping Alg
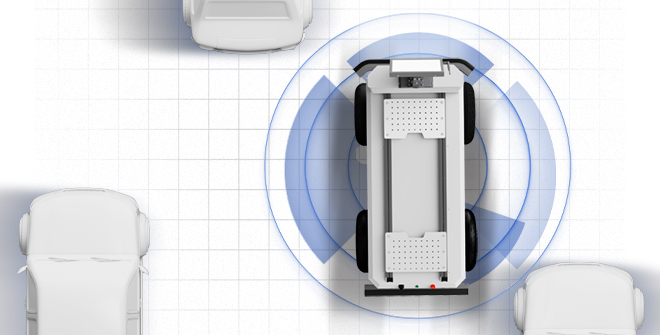
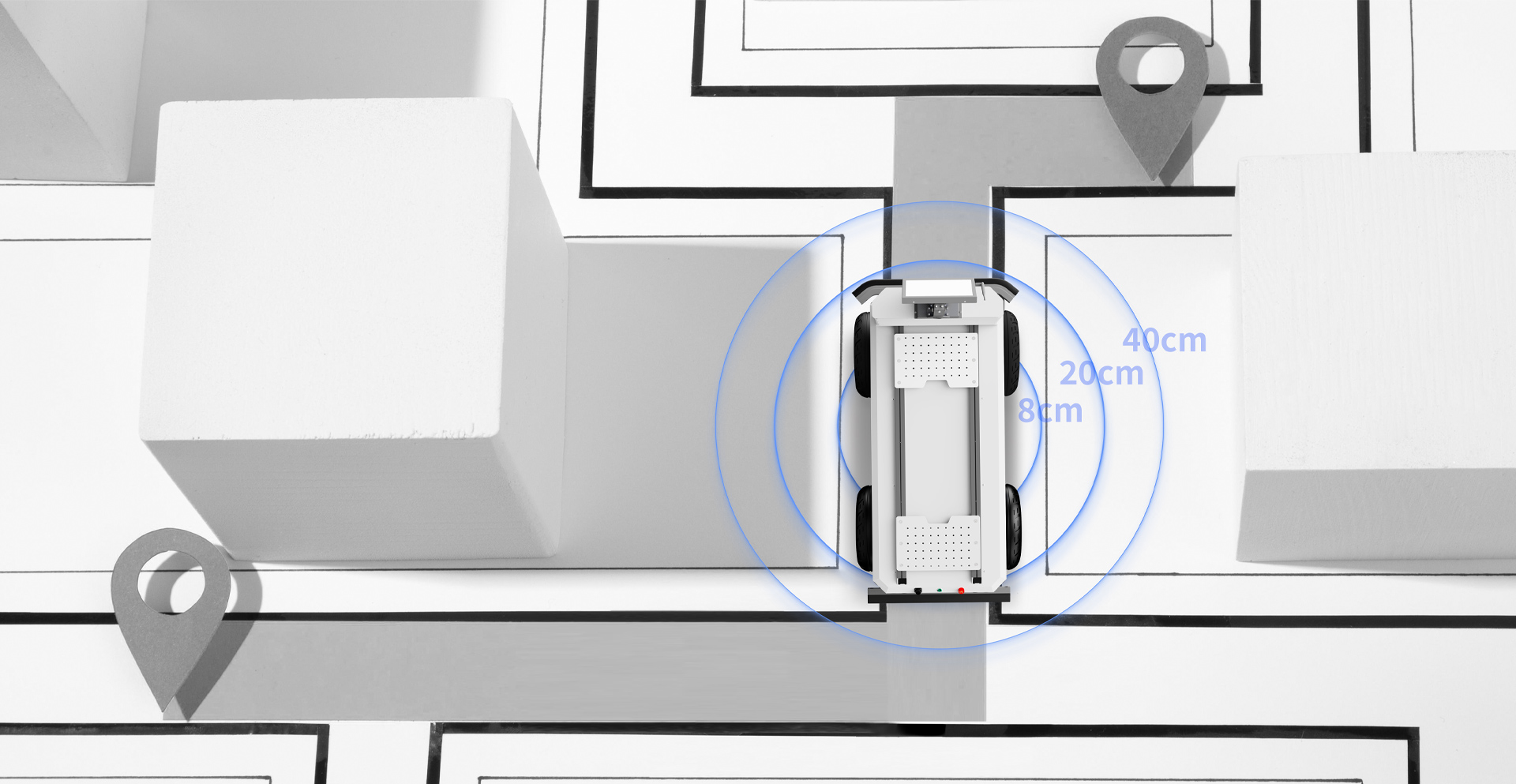
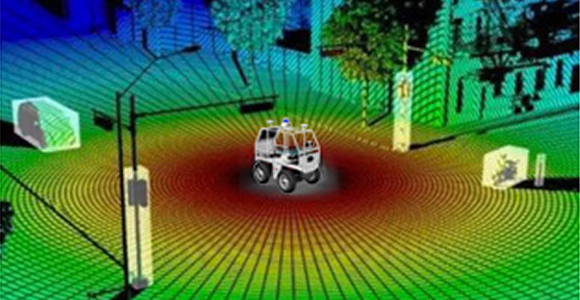
Perception & Obstacle Avoidance Alg
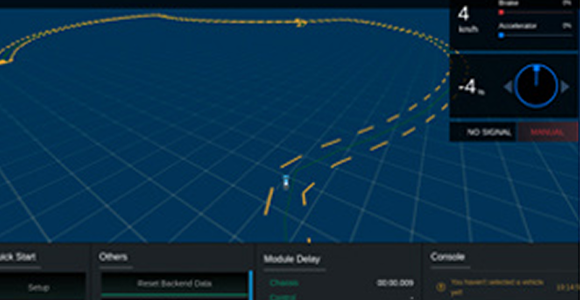
Nav Alg

3rd-party Perception Exp

Visual Nav Alg
Localization Alg
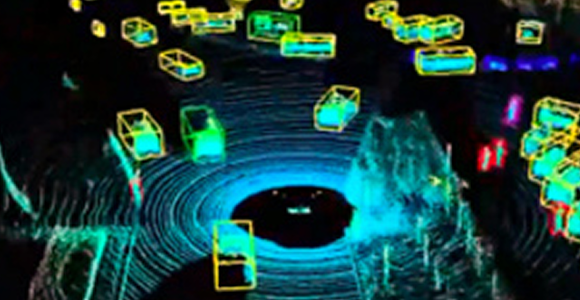
3D LiDAR Fusion
Auto Mapping Alg
Perception & Obstacle Avoidance Alg
Nav Alg

3rd-party Perception Exp

Visual Nav Alg

Development

Training

Teaching

Research
Support the deployment of various modular applications,
and jointly expand the infinite industry future with you.

