





Intelligent Internet Discipline Field
Apollo Basics → In-Depth Industry Algorithms | Meets ICV Practical & Principle Needs | Supports Automotive Autonomous Navigation Precision Optimization & Algorithm Development
 FR-mini
200KG
FR-mini
200KG
 MK-mini
50KG
MK-mini
50KG
 MK-mid
80KG
MK-mid
80KG
 FR-mid
100KG
FR-mid
100KG
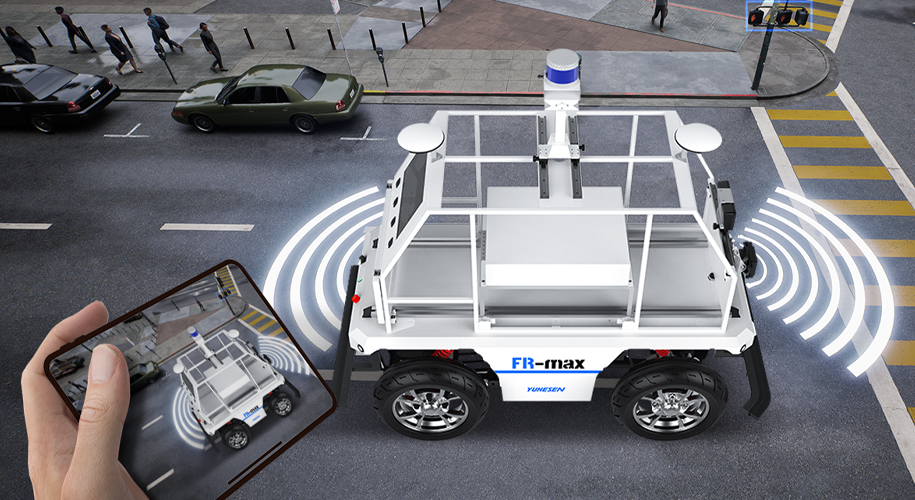
 FR-max
300KG
FR-max
300KG
 FR-mega
600KG
FR-mega
600KG
 TK-mid
80KG
TK-mid
80KG
 DT-mini
10KG
DT-mini
10KG
 DT-mid
10KG
DT-mid
10KG
 FB-FW-IIC
150KG
FB-FW-IIC
150KG
 FW-venus
200KG
FW-venus
200KG
 NV-magic
Industry Application Navigation
NV-magic
Industry Application Navigation
 OS-nano
Embodied Intelligent Navigation
OS-nano
Embodied Intelligent Navigation
 OS-mate
ROS1/ROS2 Navigation
OS-mate
ROS1/ROS2 Navigation
 OS-mars
Autoware Navigation
OS-mars
Autoware Navigation
 OS-saturn
Apollo Navigation
OS-saturn
Apollo Navigation
 GitHub
GitHub






Featuring open-source APOLLO navigation technology, it delivers an "open body and brain" solution for academic education, autonomous driving enterprises and scientific research.
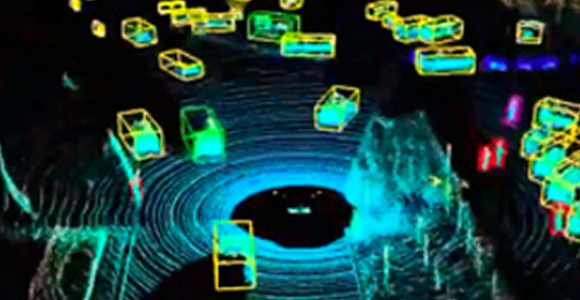
Fusion of multi-source sensing data and diverse algorithms supports navigation development and application in complex environments, laying a solid technical foundation for autonomous driving, robotics and enhanced navigation applications.
From underlying hardware to upper-layer algorithms, hardware structures to system integration, and installation operations to innovative research. Build a full-process practical research framework to drive innovation and solve complex problems.

Based on the Apollo Navigation Research & Education Platform, we build a "Practice-Theory-Research" system centered on the "Perception-Localization-Planning-Control" architecture, consolidating the foundation for intelligent connected innovation.

Apollo Basics → In-Depth Industry Algorithms | Meets ICV Practical & Principle Needs | Supports Automotive Autonomous Navigation Precision Optimization & Algorithm Development

By virtue of open-source autonomous navigation, Traditional Automation Upgrade → Unmanned Autonomous Mobility + Operation Collaboration | Key Support for Mechanical Automation & Computer Info Majors

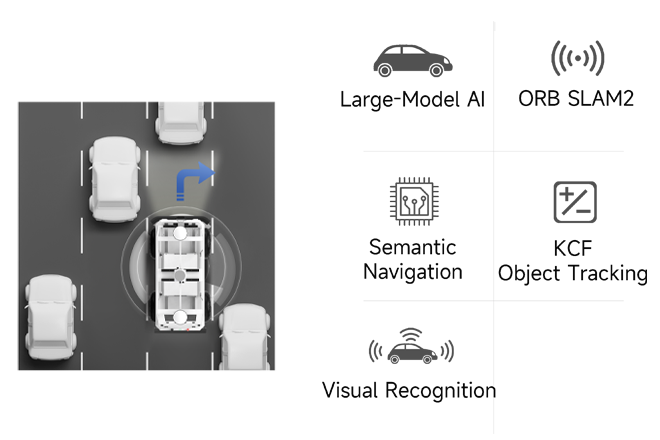
Based on "underlying open-source general AI", it covers object detection and recognition, instance segmentation, image enhancement and denoising, forming exclusive AI development capabilities centered on the "Artificial Intelligence" discipline.

RTK Fusion | Promotes smart agriculture and agricultural engineering, provides full-process technical support for the intelligent R&D of agricultural equipment, As a key connecting tool between majors and industrial implementation.

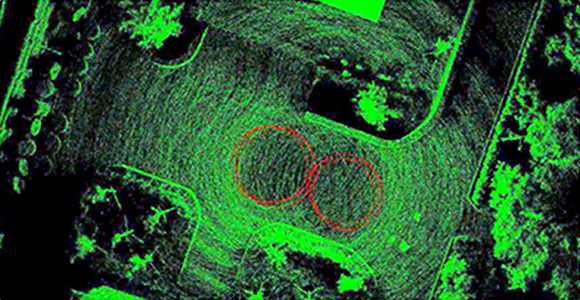
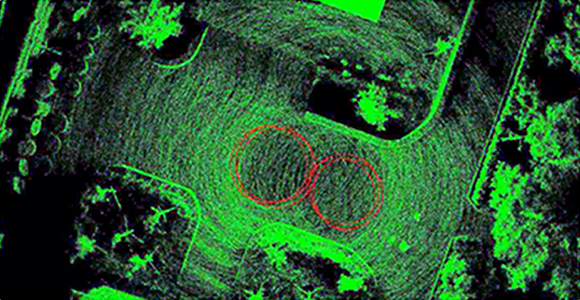
Auto Mapping Alg

Visual Nav Alg
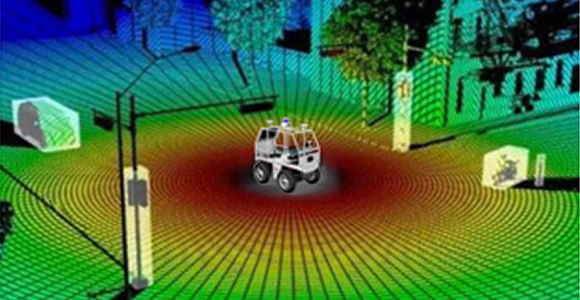
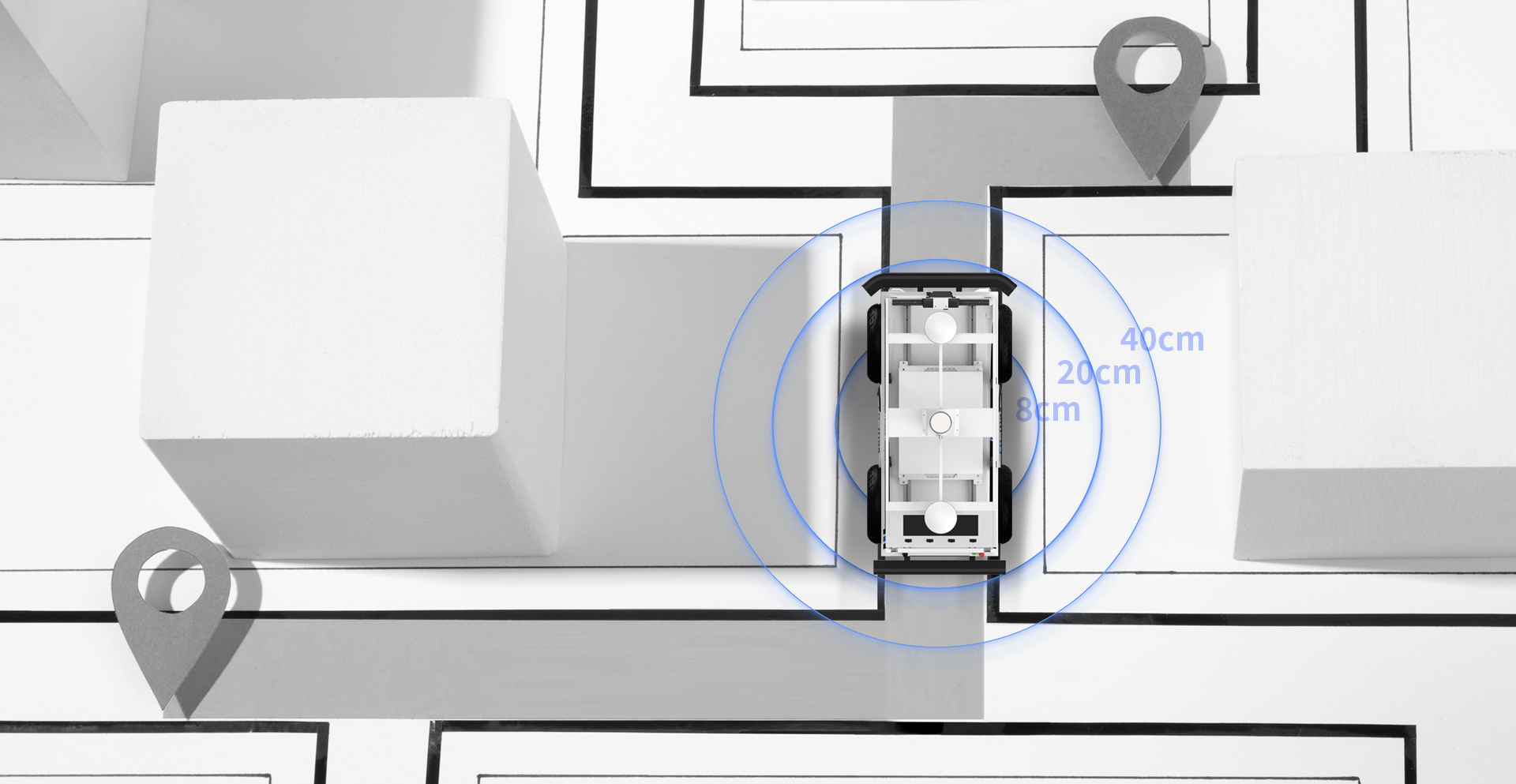
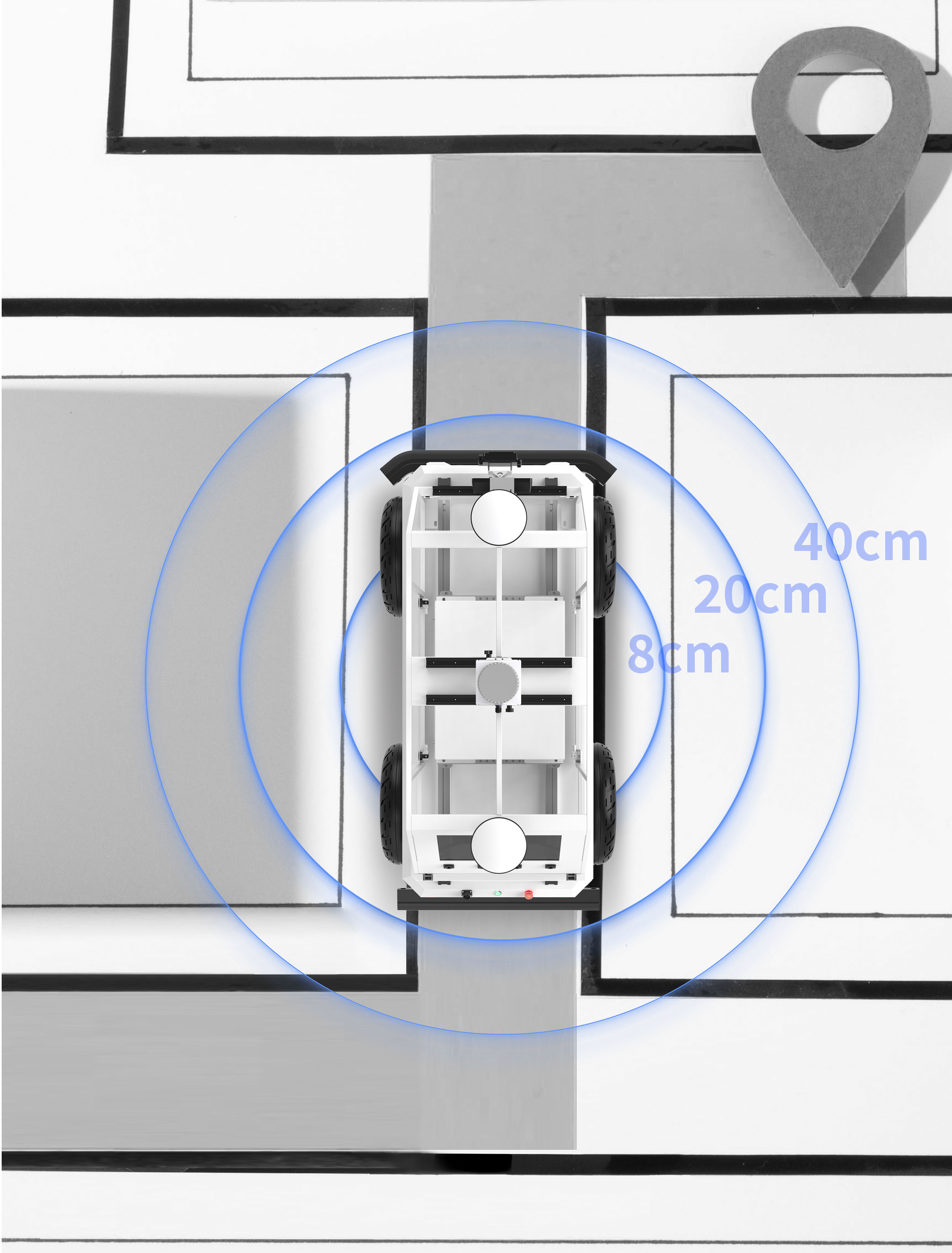
Perception & Obstacle Avoidance Alg
Perception Calib Alg
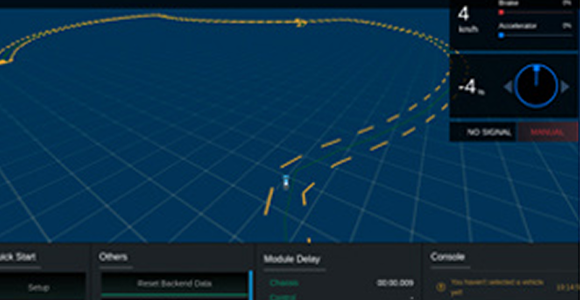
Path Planning Alg

Visual NN Alg

Deep Learning Alg
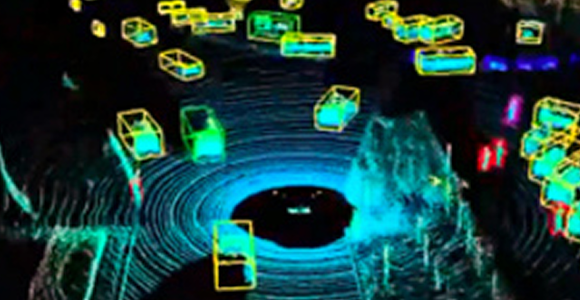
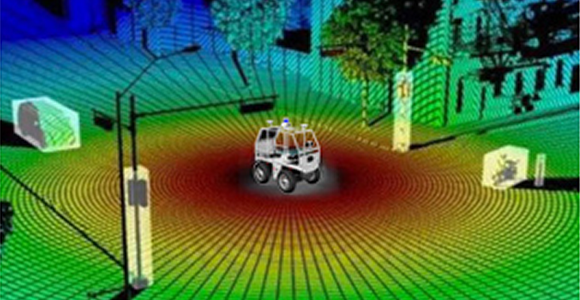
Visual-LiDAR Fusion Alg
Auto Mapping Alg

Visual Nav Alg
Perception & Obstacle Avoidance Alg
Perception Calib Alg
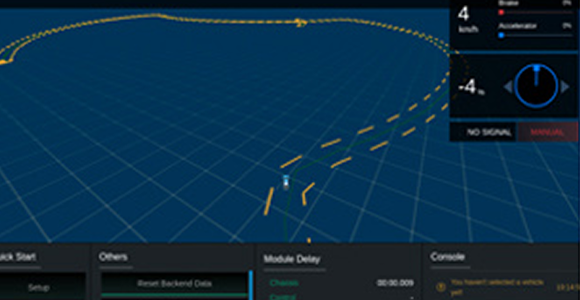
Path Planning Alg

Visual NN Alg

Deep Learning Alg
Visual-LiDAR Fusion Alg

Development

Training

Education

Research
Support the deployment of various modular applications,
and jointly expand the infinite industry future with you.

